Note
Click here to download the full example code
Introduction: Matching Isomorphic Graphs
This example is an introduction to pygmtools which shows how to match isomorphic graphs.
Isomorphic graphs mean graphs whose structures are identical, but the node correspondence is unknown.
# Author: Runzhong Wang <runzhong.wang@sjtu.edu.cn>
# Qi Liu <purewhite@sjtu.edu.cn>
#
# License: Mulan PSL v2 License
Note
The following solvers support QAP formulation, and are included in this example:
import jittor as jt # jittor backend
import pygmtools as pygm
import matplotlib.pyplot as plt # for plotting
from matplotlib.patches import ConnectionPatch # for plotting matching result
import networkx as nx # for plotting graphs
pygm.BACKEND = 'jittor' # set default backend for pygmtools
_ = jt.set_seed(1) # fix random seed
jt.flags.use_cuda = jt.has_cuda
Generate two isomorphic graphs
num_nodes = 10
X_gt = jt.zeros((num_nodes, num_nodes))
X_gt[jt.arange(0, num_nodes, dtype=jt.int64), jt.randperm(num_nodes)] = 1
A1 = jt.rand(num_nodes, num_nodes)
A1 = (A1 + A1.t() > 1.) * (A1 + A1.t()) / 2
A1[jt.arange(A1.shape[0]), jt.arange(A1.shape[0])] = 0
A2 = jt.matmul(jt.matmul(X_gt.t(), A1), X_gt)
n1 = jt.Var([num_nodes])
n2 = jt.Var([num_nodes])
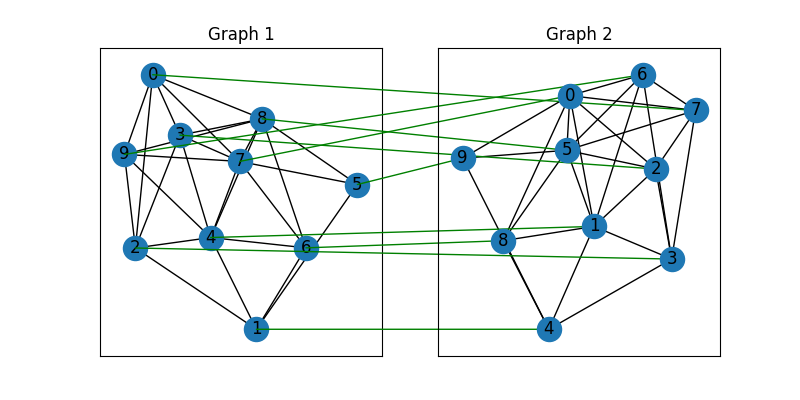
Visualize the graphs
plt.figure(figsize=(8, 4))
G1 = nx.from_numpy_array(A1.numpy())
G2 = nx.from_numpy_array(A2.numpy())
pos1 = nx.spring_layout(G1)
pos2 = nx.spring_layout(G2)
plt.subplot(1, 2, 1)
plt.title('Graph 1')
nx.draw_networkx(G1, pos=pos1)
plt.subplot(1, 2, 2)
plt.title('Graph 2')
nx.draw_networkx(G2, pos=pos2)
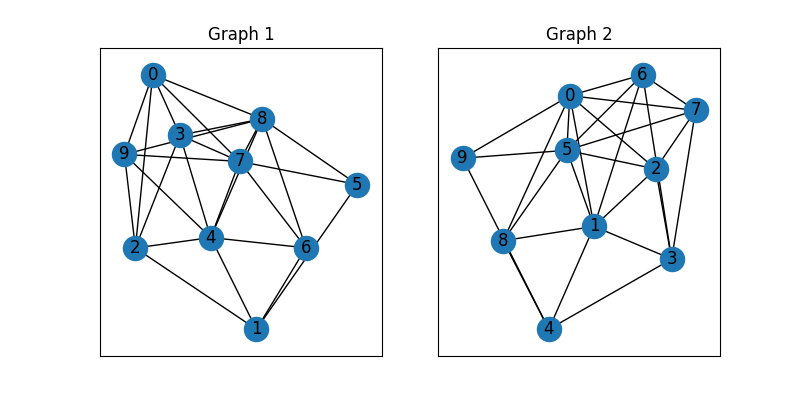
These two graphs look dissimilar because they are not aligned. We then align these two graphs by graph matching.
Build affinity matrix
To match isomorphic graphs by graph matching, we follow the formulation of Quadratic Assignment Problem (QAP):
where the first step is to build the affinity matrix (\(\mathbf{K}\))
conn1, edge1 = pygm.utils.dense_to_sparse(A1)
conn2, edge2 = pygm.utils.dense_to_sparse(A2)
import functools
gaussian_aff = functools.partial(pygm.utils.gaussian_aff_fn, sigma=.1) # set affinity function
K = pygm.utils.build_aff_mat(None, edge1, conn1, None, edge2, conn2, n1, None, n2, None, edge_aff_fn=gaussian_aff)
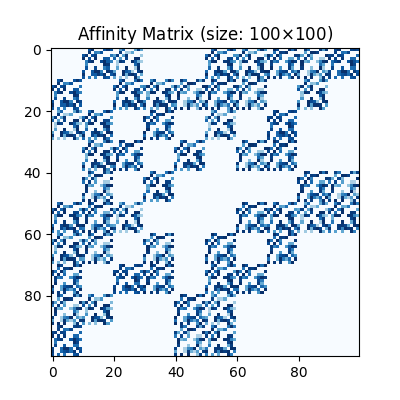
Visualization of the affinity matrix. For graph matching problem with \(N\) nodes, the affinity matrix has \(N^2\times N^2\) elements because there are \(N^2\) edges in each graph.
Note
The diagonal elements of the affinity matrix are empty because there is no node features in this example.
plt.figure(figsize=(4, 4))
plt.title(f'Affinity Matrix (size: {K.shape[0]}$\\times${K.shape[1]})')
plt.imshow(K.numpy(), cmap='Blues')
<matplotlib.image.AxesImage object at 0x7feef6f66820>
Solve graph matching problem by RRWM solver
See rrwm() for the API reference.
X = pygm.rrwm(K, n1, n2)
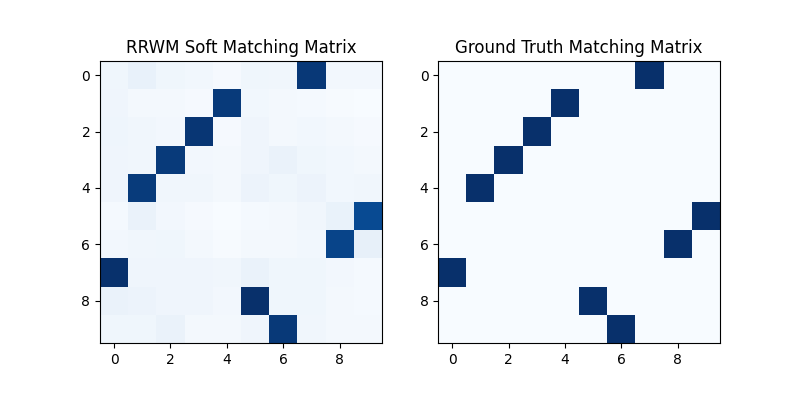
The output of RRWM is a soft matching matrix. Visualization:
plt.figure(figsize=(8, 4))
plt.subplot(1, 2, 1)
plt.title('RRWM Soft Matching Matrix')
plt.imshow(X.numpy(), cmap='Blues')
plt.subplot(1, 2, 2)
plt.title('Ground Truth Matching Matrix')
plt.imshow(X_gt.numpy(), cmap='Blues')
<matplotlib.image.AxesImage object at 0x7feef71d4430>
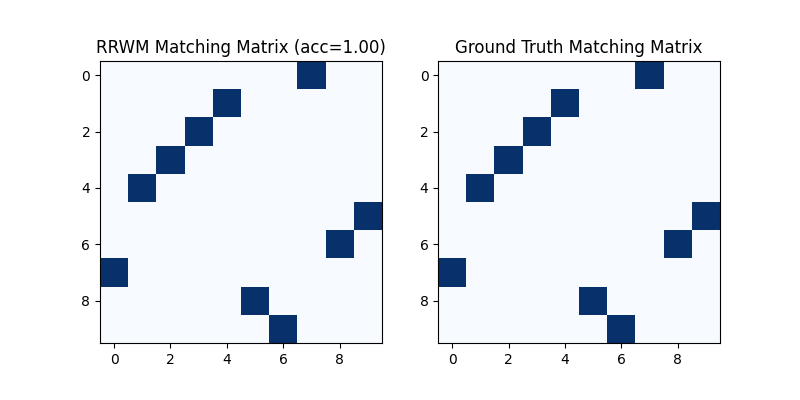
Get the discrete matching matrix
Hungarian algorithm is then adopted to reach a discrete matching matrix
X = pygm.hungarian(X)
Visualization of the discrete matching matrix:
plt.figure(figsize=(8, 4))
plt.subplot(1, 2, 1)
plt.title(f'RRWM Matching Matrix (acc={(X * X_gt).sum()/ X_gt.sum():.2f})')
plt.imshow(X.numpy(), cmap='Blues')
plt.subplot(1, 2, 2)
plt.title('Ground Truth Matching Matrix')
plt.imshow(X_gt.numpy(), cmap='Blues')
<matplotlib.image.AxesImage object at 0x7feef6946b20>
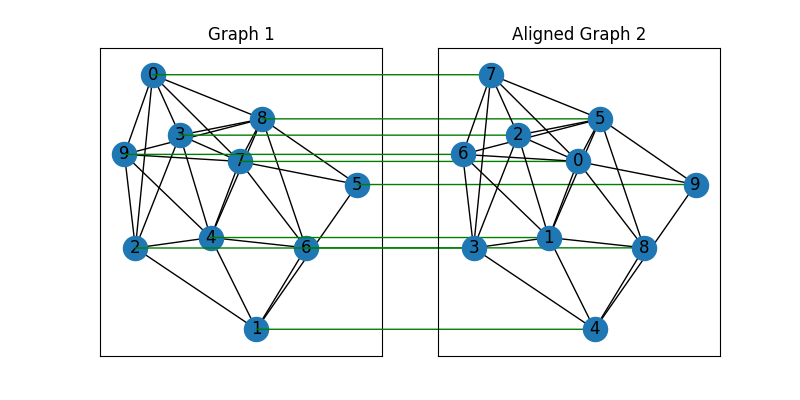
Align the original graphs
Draw the matching (green lines for correct matching, red lines for wrong matching):
plt.figure(figsize=(8, 4))
ax1 = plt.subplot(1, 2, 1)
plt.title('Graph 1')
nx.draw_networkx(G1, pos=pos1)
ax2 = plt.subplot(1, 2, 2)
plt.title('Graph 2')
nx.draw_networkx(G2, pos=pos2)
for i in range(num_nodes):
j = jt.argmax(X[i], dim=-1)[0].item()
con = ConnectionPatch(xyA=pos1[i], xyB=pos2[j], coordsA="data", coordsB="data",
axesA=ax1, axesB=ax2, color="green" if X_gt[i, j] == 1 else "red")
plt.gca().add_artist(con)
Align the nodes:
align_A2 = jt.matmul(jt.matmul(X, A2), X.t())
plt.figure(figsize=(8, 4))
ax1 = plt.subplot(1, 2, 1)
plt.title('Graph 1')
nx.draw_networkx(G1, pos=pos1)
ax2 = plt.subplot(1, 2, 2)
plt.title('Aligned Graph 2')
align_pos2 = {}
for i in range(num_nodes):
j = jt.argmax(X[i], dim=-1)[0].item()
align_pos2[j] = pos1[i]
con = ConnectionPatch(xyA=pos1[i], xyB=align_pos2[j], coordsA="data", coordsB="data",
axesA=ax1, axesB=ax2, color="green" if X_gt[i, j] == 1 else "red")
plt.gca().add_artist(con)
nx.draw_networkx(G2, pos=align_pos2)
Other solvers are also available
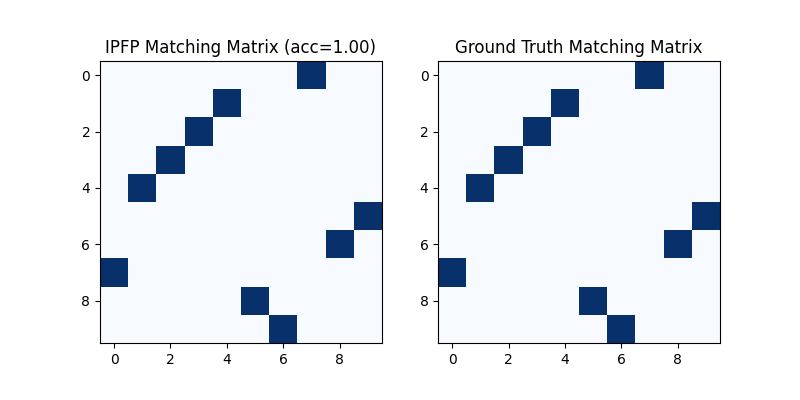
Classic IPFP solver
See ipfp() for the API reference.
X = pygm.ipfp(K, n1, n2)
Visualization of IPFP matching result:
plt.figure(figsize=(8, 4))
plt.subplot(1, 2, 1)
plt.title(f'IPFP Matching Matrix (acc={(X * X_gt).sum()/ X_gt.sum():.2f})')
plt.imshow(X.numpy(), cmap='Blues')
plt.subplot(1, 2, 2)
plt.title('Ground Truth Matching Matrix')
plt.imshow(X_gt.numpy(), cmap='Blues')
<matplotlib.image.AxesImage object at 0x7feef5a85940>
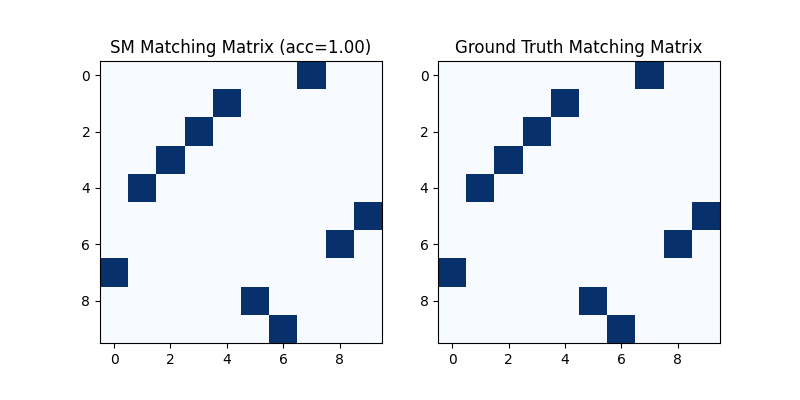
Classic SM solver
See sm() for the API reference.
X = pygm.sm(K, n1, n2)
X = pygm.hungarian(X)
Visualization of SM matching result:
plt.figure(figsize=(8, 4))
plt.subplot(1, 2, 1)
plt.title(f'SM Matching Matrix (acc={(X * X_gt).sum()/ X_gt.sum():.2f})')
plt.imshow(X.numpy(), cmap='Blues')
plt.subplot(1, 2, 2)
plt.title('Ground Truth Matching Matrix')
plt.imshow(X_gt.numpy(), cmap='Blues')
<matplotlib.image.AxesImage object at 0x7feef6b3e160>
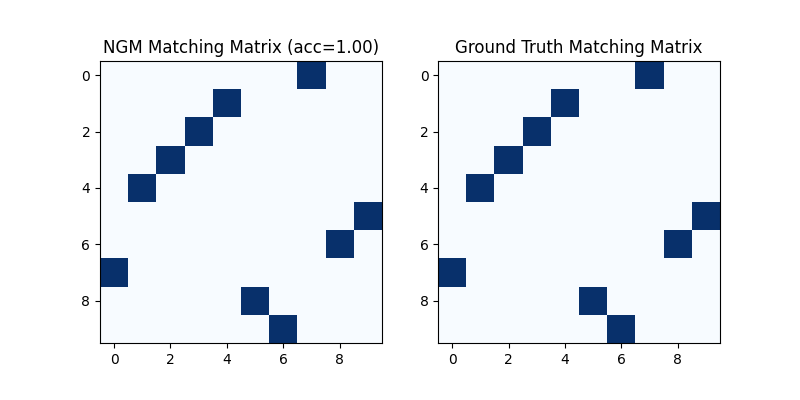
NGM neural network solver
See ngm() for the API reference.
with jt.no_grad():
X = pygm.ngm(K, n1, n2, pretrain='voc')
X = pygm.hungarian(X)
Visualization of NGM matching result:
plt.figure(figsize=(8, 4))
plt.subplot(1, 2, 1)
plt.title(f'NGM Matching Matrix (acc={(X * X_gt).sum()/ X_gt.sum():.2f})')
plt.imshow(X.numpy(), cmap='Blues')
plt.subplot(1, 2, 2)
plt.title('Ground Truth Matching Matrix')
plt.imshow(X_gt.numpy(), cmap='Blues')
<matplotlib.image.AxesImage object at 0x7feef3e7e280>
Total running time of the script: ( 0 minutes 16.270 seconds)